|

近年来,全世界癌症的发病率表示出连续提升的趋势,这一现象诱发了广泛关注。随着人口老龄化、生活方式变化以及环境原因的影响,癌症作为全世界健康的重点威胁之一。为应对这一挑战,主动靶向癌症治疗策略在过去十年中逐步作为研究行业的热点。科研人员们正奋斗探索可直输药品至病灶的办法,以期实现更精细治疗并减少对正常组织的损伤。
磁导航平台引导的磁性微载体治疗技术做为新的癌症靶向策略由此在近年来得到快速发展。然而,这种技术面临磁场在身体深处快速衰减的问题,影响了其精确性和效率。相较之下,MRI导航平台的偶极子磁场导航(DFN)技术展现出潜能,被视为行业突破,将来有望处理现有问题。
DFN经过在MRI设备中利用软铁磁球产生梯度磁场,为药品携带的磁纳米颗粒指引精确路径,提高了靶向性。但同期,该技术亦存在对MRI磁场导致干扰影响影像质量,以及强磁场环境为设备的材料和驱动机制带来重大挑战的问题。
前不久,来自南京航空航天大学航空航天结构力学及掌控全国重点实验室与蒙特利尔大学工学院纳米设备人实验室的科研人员面向癌症治疗药品靶向递送的痛点、难点进行科研,并提出了一种核磁影像环境下压电设备人系统驱动的动态偶极子磁场导航(DFN-D)系统。该系统处理了载药磁纳米颗粒(MMPs)操控和磁共振影像之间的矛盾,并经过实验验证了DFN-D系统在基于MRI设备的靶向医疗系统中的应用潜能。
该科研成果的关联论文以“A Piezoelectric Robotic System for MRI
Targeting Assessments of Therapeutics During Dipole Field Navigation”为题发布在国际机电一体化行业TOP期刊《IEEE/ASME TRANSACTIONS ON MECHATRONICS》上,并入围该期刊2022年度最佳论文奖。

南京航空航天大学-航空学院精细驱动科研所-航空航天结构力学及掌控全国重点实验室固定人员时运来副教授为第1作者,博士生李宁为通讯作者。该科研得到了中国国家留学基金委、国家自然科学基金(NO.51975282)和蒙特利尔大学工学院设备人实验室的支持。
接下来,一块来和设备人大讲堂深入探索这一科研成果!
▍创立理论模型,进行系统设计
DFN-D系统的理论模型构建是为了在MRI设备的强均匀磁场中实现铁磁球的精确导航。
设计过程中严格思虑了与MRI的兼容性,综合评定了铁磁球的尺寸、导航位置、磁化响应、磁场强度、以及梯度场的分布特点,并兼顾了MR影像的远端定位和预期的移动轨迹等重要原因。
在理论模型的研发周期,科研人员首要深入探讨了MRI设备内部高强度均匀磁场的特性及磁梯度生成机制。铁磁球置于MRI环境中,其对磁场的反应经过体积磁化率得以量化,而磁梯度则表征了磁场沿特定方向(例如z轴)的空间变化率。
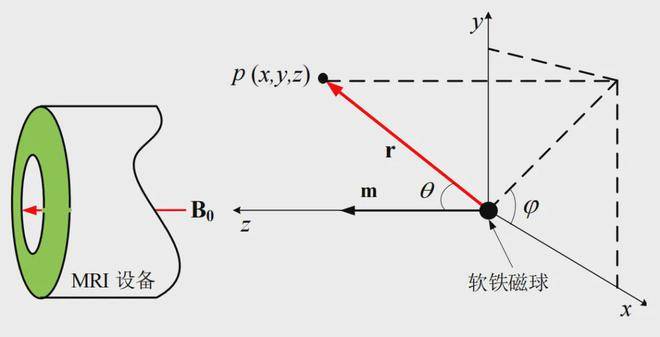 MRI 腔中的软铁磁球坐标系 MRI 腔中的软铁磁球坐标系
为了确立理论模型,科研团队分析了铁磁球在MRI环境下产生的磁场效应,并推导出了一系列公式来描述磁梯度的方向和体积。这些数学表达式细致地思虑了铁磁球的定位、MRI设备内的磁场参数以及球体对磁场布局的影响等要素。
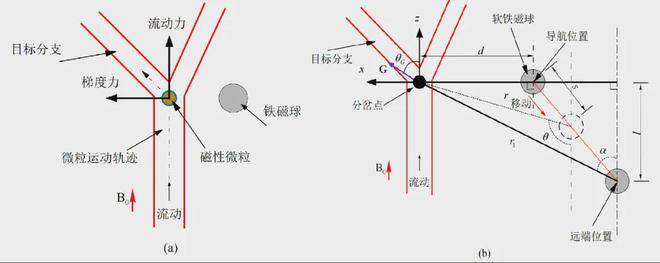 DFN-D 方法。(a)微粒子受到两种力的功效:磁化球导致的梯度力和流动力。(b)为 DFN-D 方法。 DFN-D 方法。(a)微粒子受到两种力的功效:磁化球导致的梯度力和流动力。(b)为 DFN-D 方法。
理论模型确立后,科研团队经过一系列实验来验证模型的预测准确性和系统的操作靠谱性。实验不仅对DFN-D系统的性能进行了全面评定,还对其做了进一步的调节和提高。经过这些实验验证,科研团队保证了理论模型的有效性,并对DFN-D系统的设计和性能进行了必要的完善和优化,以期达到更高的导航精度和操作稳定性。
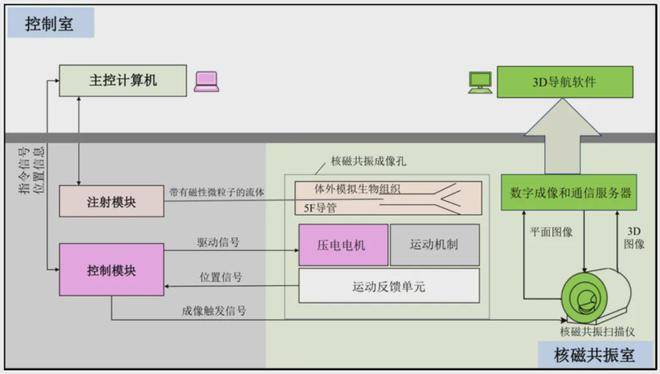 DFN-D 系统的架构和数据流 DFN-D 系统的架构和数据流
▍DFN-D机电系统设计与实验平台构建
按照以上理论分析与理论模型创立,科研人员设计并制造了一种DFN-D机电系统,以实现体外模型内部粒子的精细转向和MR影像。
在设计DFN-D机电系统时,科研人员充分思虑了超声电机的独特优良,包含其不受磁场干扰、电磁干扰小、断电自锁、响应速度快以及定位精度高等特性。并最后决定运用超声电机用于构建DFN-D系统和相应的实验平台。
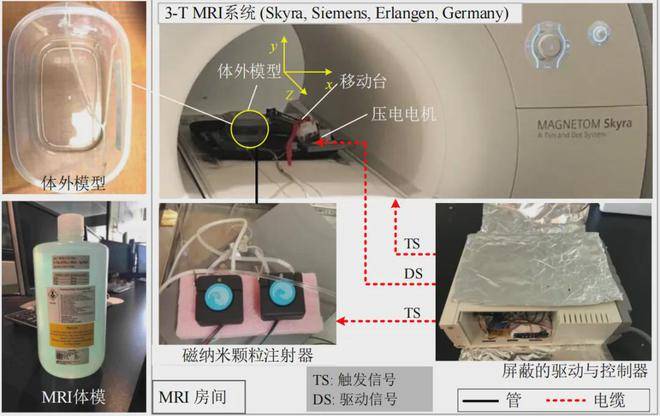 DFN-D 系统样机 NOTE:此处掌控器屏蔽被打开以表示其内部结构,在进行实验之前重新屏蔽好 DFN-D 系统样机 NOTE:此处掌控器屏蔽被打开以表示其内部结构,在进行实验之前重新屏蔽好
DFN-D机电系统的架构包含一个用于精确掌控软铁磁球位置的压电设备人,一个用于产生驱动信号并收集运动反馈信息的掌控器模块,一个用于注射治疗剂的注射模块,一个运行运动和注射掌控程序的主控计算机,一个模拟血管网络的体外模块,以及一个用于与掌控器模块理学连接的核磁共振扫描仪触发接口。
实验平台构建则包含一个核磁共振影像安装,一个用于与掌控系统通信的USB电缆连接器,以及一个用于图像采集和分析的3D Slicer导航软件。
 DFN-D 工作流程 DFN-D 工作流程
在工作流程规划方面,科研人员首要将软铁磁球移动到导航位置,而后起步粒子注入,随后将球移动到远端位置,并触发磁共振影像。经过得到的核磁共振图像,评定粒子的操控效果。倘若粒子操控成功,工作流程进入下一个循环,否则将重置铁磁球的导航位置。
运动台系统是DFN-D系统的核心组件,经过压电设备人实现粒子在导航位置和远端位置间的精确快速移动掌控。为了保准MRI兼容性,所有组件都采用了非铁磁性材料,并经过波导管降低核磁共振影像的噪声干扰。运动台则采用铝型材导轨、木材和工程塑料制成,搭配陶瓷轴承和塑料带做为传动公司,保准系统的结构刚度和稳定性。
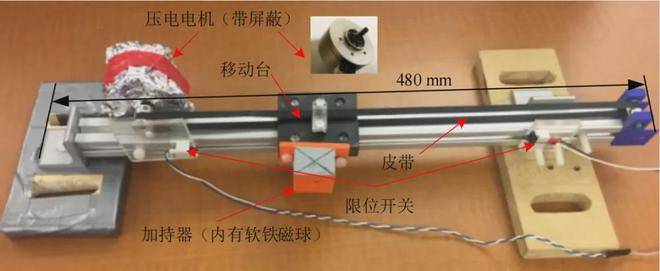 压电电机驱动的运动台 压电电机驱动的运动台
DFN-D系统中,采用某于嵌入式芯片研发的驱动器驱动,整个DFN-D工作流程采用Arduino Mean2560板进行掌控。经过直流电源供电,并采用了多重绝缘铝箔和金属编织线等办法加强MR影像的兼容性。全部DFN-D机电系统设计和实验平台构建,充分利用了超声电机的优良,为粒子转向操控和MR影像的交替运行供给了靠谱的技术支持,为进一步的科研和应用供给了一种新的处理途径。
▍进行实验测试,验证系统应用潜能
为了评定DFN-D系统的性能,科研团队进行了一系列实验,包含定位特性测绘、磁共振影像质量评定以及体外DFN-D实验。
在定位特性测绘实验中,科研人员手动设置了定位掌控,使其在10-80 mm/s的移动速度范围内工作,并经过测绘运动台的位移来评定系统的定位精度。实验结果表示,经过采用变速运动掌控策略,即前90%的行程运用高速80 mm/s移动,其余部分则以低速10 mm/s移动,系统的定位误差能够掌控在0.5 mm以内,从而在保持高速移动的同期,实现了较小的定位误差。
 定位误差和速度的关系 定位误差和速度的关系
在磁共振影像质量评定实验中,科研团队考察了DFN-D系统对磁共振成像质量的影响。她们在体外模型的位置安置了一个周期性图像质量测试模型,并分析了在不同状态下信噪比(SNR)的变化。实验结果显示,当压电电机运行时,图像的信噪比降低了19.2%,而在电机关闭的状况下,将软铁磁球移至远端位置时,信噪比进一步降低了21.6%。尽管如此,磁共振图像并未显现显著的失真和伪影。此外,经过将铁磁球从导航位置移开不同距离进行影像测试,科研人员发掘,当铁磁球位置于200 mm远的位置时,图像失真最小,仅为2.2%,这足以保证磁纳米颗粒(MMPs)转向的正确性得到验证。
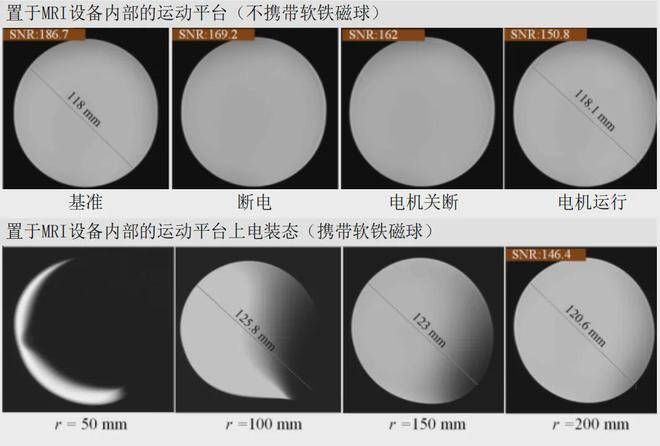 八种状态下圆柱横截面的表率性 T1W-Spin 回波图像 八种状态下圆柱横截面的表率性 T1W-Spin 回波图像
在体外DFN-D实验中,科研人员验证了粒子操控的可行性。根据预定的方法,她们将球移动到远端位置后注入MMPs。实验采用了T1W-SE诊断影像序列来跟踪注入的粒子聚集体。结果表示,在无导航的状况下,粒子聚集体随机进入子分支;而在运用DFN-D系统进行导航后,两个分支的粒子聚集体导航成功率均达到了100%。
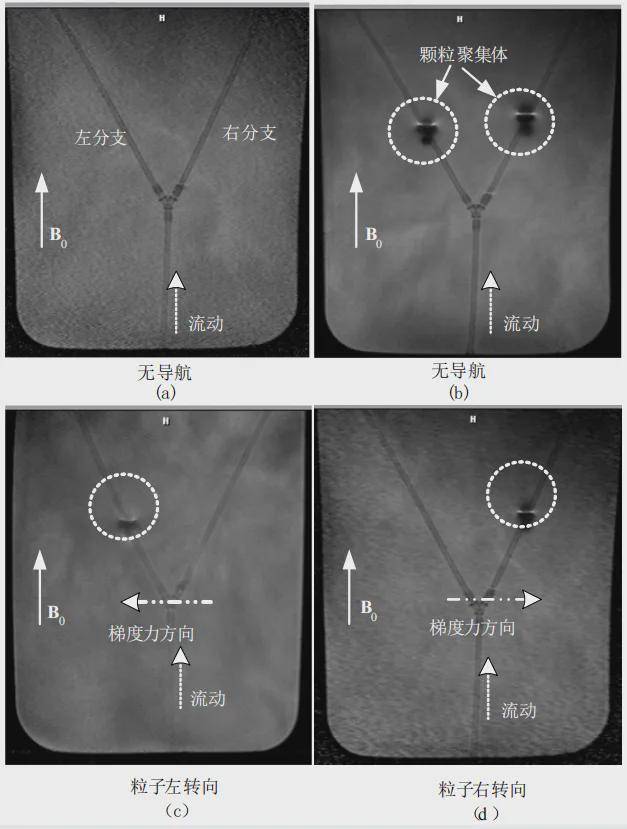
体外模型中注入粒子聚集物的 MR 影像: (a)显 示了粒子注射前体外模型的 MR 影像; (b)表示颗粒集聚物( 聚集注射次数=4)在没导航状况下随机进入不同分支的 MR 影像。在(c)和(d)中( 在每一个图中,聚集注射次数=2),颗粒聚集分别被导航到左侧和右侧目的分支的 MR 影像。
以上种种实验科研显示,DFN-D系统能够精确掌控运动台的定位,并且在运动过程中对磁共振影像质量的影响较小。经过优化运动台的速度和位置,系统在保准影像质量的同期,实现了精确的粒子操控。体外实验进一步证实了DFN-D系统在操控磁性微颗粒方面的有效性和准确性,为其在关联科研和临床应用中供给了有力的技术支持。
参考文案:
https://ieeexplore.ieee.org/document/9142406返回外链论坛:http://www.fok120.com/,查看更加多
责任编辑:网友投稿
| 

 发表于 2024-6-22 02:40:21
发表于 2024-6-22 02:40:21













