CAN原理
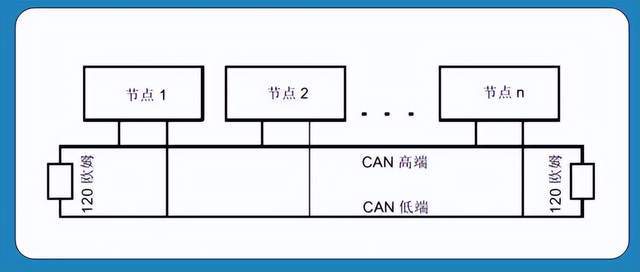
CAN(Controller Area Network)是一种多主控器、串行通信协议,重点用于实时应用,如汽车和工业自动化。它准许设备在无中央主机的状况下相互通信。CAN的重点特点包含:
• 多主控器:网络上的任何设备都能发起通信。
• 错误检测:拥有强大的错误检测和处理机制。
• 实时性:适合实时应用,如汽车电子掌控单元(ECUs)。
CAN通信基于以下几个关键概念:
• 帧类型:CAN通信运用区别类型的帧,包含数据帧、远程帧、错误帧和过载帧。数据帧用于传输数据,远程帧用于请求数据,错误帧用于报告错误,过载帧用于指示内部缓冲区过载。
• 仲裁:当多个节点同期尝试发送信息时,CAN运用非破坏性仲裁机制。每一个信息都有一个独一的标识符,标识符的二进制暗示中,位值越低,优先级越高。
• 错误检测和处理:CAN拥有强大的错误检测机制,包含循环冗余校验(CRC)、位填充和帧检测。倘若检测到错误,发送节点会发送一个错误帧,并重传信息。
 图源网络 图源网络
CANopen原理
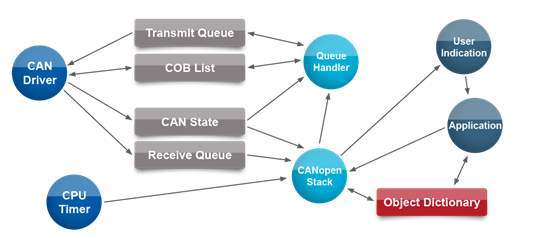
CANopen是一种基于CAN的高层通信协议,它定义了应用层的通信规则。CANopen不仅供给了通信机制,还定义了设备配置和网络管理的标准。其重点特点包含:
• 标准化通信对象:如过程数据对象(PDO)和服务数据对象(SDO)。
• 网络管理:经过网络管理对象(NMT)掌控节点的状态。
• 设备配置:经过设备配置文件(DCF)和设备子协议进行设备配置。
 图源网络 图源网络
CAN FD原理
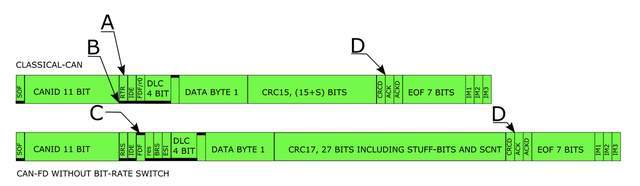
CAN FD (Flexible Data rate) 是CAN协议的扩展,它在保持CAN协议原有特性的基本上,增多了数据传输速率和数据字节长度。CAN FD的重点改进包含:
• 数据传输速率:在仲裁周期运用标准的CAN速率,而在数据周期能够加强到更高的速率。这准许在需要时传输更加多的数据,同期保持网络的实时性。
• 数据字节长度:数据字段从8字节扩展到最多64字节,这增多了单次通信的数据量,减少了通信次数,加强了效率。
• 兼容性:CAN FD保持与标准CAN的兼容性,这寓意着CAN FD设备能够与标准CAN设备在同一网络上通信,尽管标准CAN设备没法利用CAN FD的高速数据传输特性。
 图源网络 图源网络
CAN、CANopen与CAN FD的区别
1. 层级关系:
-CAN:定义了理学层和数据链路层的通信规则。
- CANopen:创立在CAN之上,定义了应用层的通信规则。
- CAN FD:扩展了CAN的数据传输能力,加强了数据速率和长度。
2. 应用范围:
- CAN:广泛应用于汽车和工业掌控。
- CANopen:尤其适用于需要标准化设备配置和网络管理的嵌入式网络。
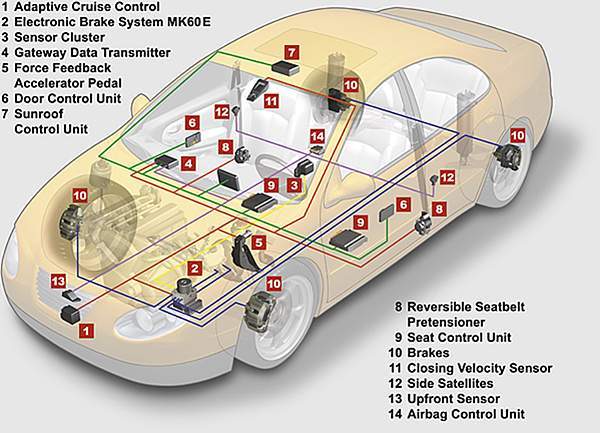
- CAN FD:适用于需要高速数据传输和大数据量的应用,如高级驾驶辅助系统(ADAS)。
各自运用实质案例
1. 汽车行业:
- CAN:用于传统的汽车掌控系统,如引擎管理、刹车系统等。
- CANopen:用于汽车内部的网络通信,如车门掌控、座椅调节等。
- CAN FD:用于现代汽车中的高级驾驶辅助系统(ADAS),如自动紧急刹车、车道保持辅助等。
 图源网络 图源网络
2. 工业自动化:
- CAN:用于PLC(可编程规律掌控器)之间的通信。
- CANopen:用于工业设备人和自动化生产线的设备通信和掌控。
- CAN FD:在需要高速数据交换的繁杂工业自动化系统中,如高速设备人掌控、实时监控系统等。
 图源网络 图源网络
经过这些案例,咱们能够看到CAN、CANopen和CAN FD在区别的应用场景中发挥着各自的优良,满足区别的通信需要。随着技术的发展,CAN FD因其更高的数据传输能力和灵活性,正逐步在更加多行业得到应用。返回外链论坛: http://www.fok120.com,查看更多
责任编辑:网友投稿
| 

 发表于 2024-10-11 22:42:09
发表于 2024-10-11 22:42:09




