|
在自动驾驶技术快速发展的今天,Nullmax纽劢再次向世界展示了其卓越的创新能力和技术实力。当地时间6月17日,为期5天在美国西雅图举行的IEEE国际计算机视觉与模式识别会议(CVPR 2024)CVPR(IEEE Conference on Computer Vision and Pattern Recognition)召开。Nullmax纽劢感知分部的3D目的检测科研《Enhancing 3D Object Detection with 2D Detection-Guided Query Anchors》成功入选CVPR 2024!这份荣誉不仅彰显了Nullmax纽劢在计算机视觉行业的领先地位,亦标志着其前沿技术连续得到国际顶级会议的认可。
CVPR被誉为计算机视觉和模式识别行业的顶级会议,迄今已然举办了40次会议。据官方数据暗示,本届会议共收到11532篇有效论文投稿,接收了其中2719篇,录用率为23.6%,比例小于往年。其收录的论文表率了计算机视觉行业的最新发展方向和最高科研水平。Nullmax纽劢的科研成果能够在如此严苛的录用标准中脱颖而出,充分展示了其在自动驾驶感知技术行业的领先地位和影响力。
在这篇入选的论文中,Nullmax纽劢提出了一种名为QAF2D(Query Anchor From 2D)的多相机3D目的检测新办法。该办法经过2D检测结果引导生成3D查找锚点(Query Anchor),明显提高了多相机3D目的检测的性能。同期,Nullmax纽劢还利用视觉提示(Visual Prompt)设计了一套两周期的优化办法,让2D和3D检测器共用图像特征提取网络,有效降低了模型训练和安排的资源消耗。
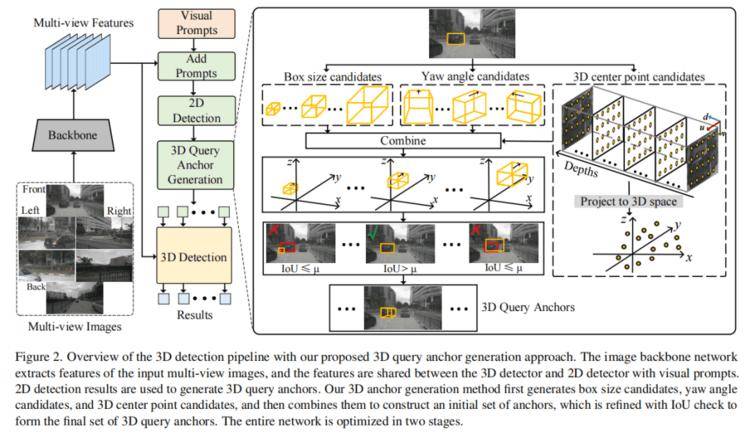
实验结果表示,QAF2D办法在nuScenes数据集上取得了明显的性能提高,平均提高1.18% NDS和1.74% mAP,最大提高达到2.3% NDS和2.7% mAP。这一成果针对提高自动驾驶系统的整体表现,尤其是加强系统驾驶的安全性拥有重要道理。将QAF2D应用到实质的量产车型上,有望进一步提高智能驾驶的整体性能,同期降低安排和研发时的硬件资源需要。
做为一家在行业前沿的自动驾驶技术企业,Nullmax纽劢自成立败兴始终致力于制品技术研发和量产项目落地。如今,机构正在加速推进量产的同期,持续扩大对新一代技术的开发,以打造更高阶的自动驾驶形态。
Nullmax纽劢在自动驾驶感知技术行业的连续创新和突破,此次论文入选CVPR 2024,再次证明了其技术实力和行业领先地位。Nullmax纽劢坚信,经过不懈的奋斗和持续的探索,Nullmax纽劢将继续引领自动驾驶技术的发展,为智能驾驶的普及和安全贡献力量。同期,Nullmax纽劢亦期待与更加多合作伙伴携手共进,一起推动自动驾驶技术的快速发展。返回外链论坛: http://www.fok120.com,查看更加多
责任编辑:网友投稿
| 

 发表于 2024-9-29 01:25:50
发表于 2024-9-29 01:25:50
